Table des matières
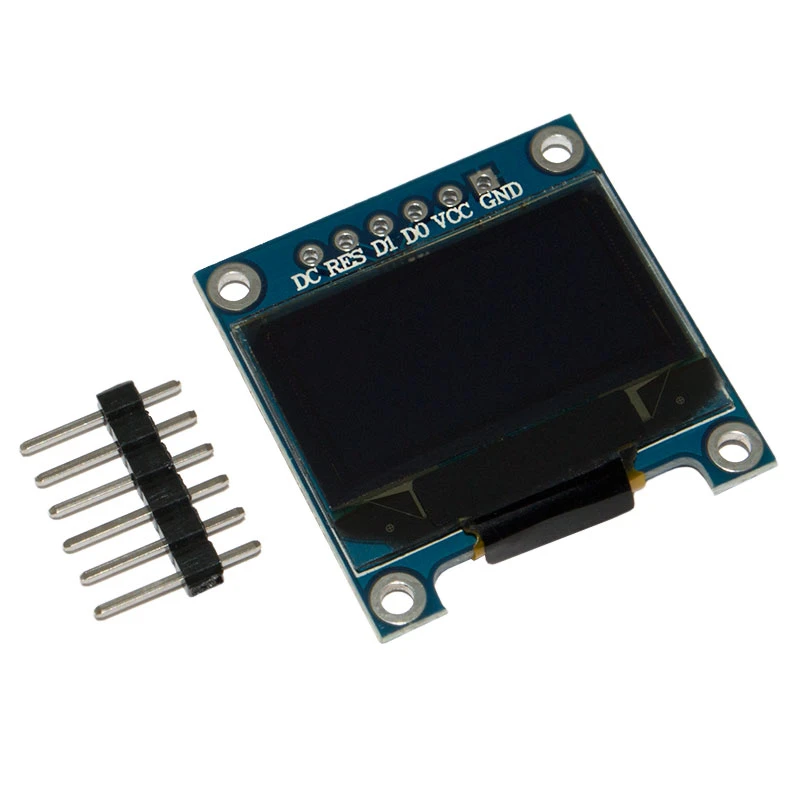
On va utiliser un petit ecran OLED a tous petit prix et au doux nom de SSD1306, il a une diagonale de 0,96", mais il est très lisible. L’écran est composé de 128x64 pixels OLED bleu sur fond noir (on peut choisir d’autres couleurs).
Le contrôleur SSD1306 permet de dialoguer en I2C ou en SPI. L’afficheur dispose de son propre régulateur 3,3V (compatible 5V et 3,3V).
Branchements
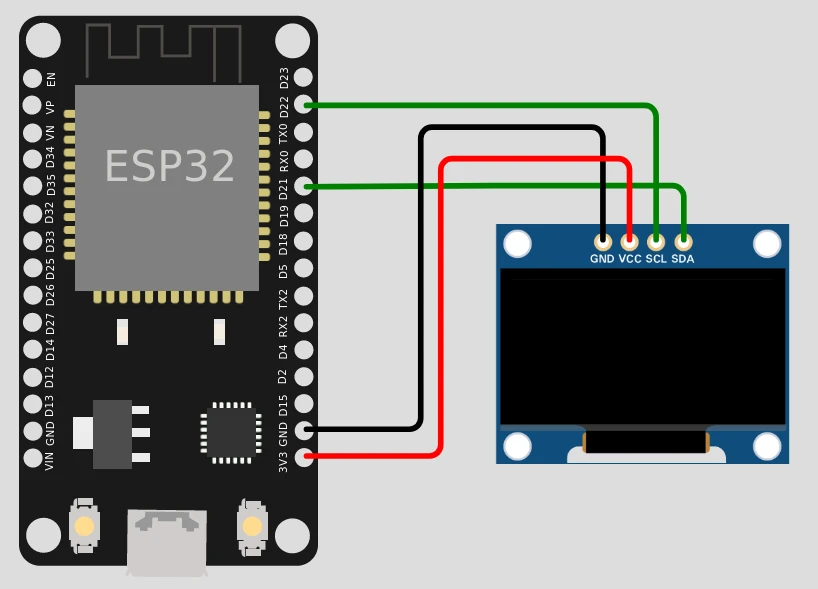
| ESP32 | SSD1306 | Description |
|---|---|---|
| 3.3v | Vcc | + |
| GDN | GDN | - |
| D21 | SDA | Data |
| D22 | SCL | Clock |
Les scripts
Pour discuter avec l’ecran, il va falloir creer un fichier ssd1306.py avec Thonny.
C’est le “driver” en gros que l’on va importer pour permetre d’echanger entre l’Esp32 et l’ecran.
# MicroPython SSD1306 OLED driver, I2C and SPI interfaces
from micropython import const
import framebuf
# register definitions
SET_CONTRAST = const(0x81)
SET_ENTIRE_ON = const(0xA4)
SET_NORM_INV = const(0xA6)
SET_DISP = const(0xAE)
SET_MEM_ADDR = const(0x20)
SET_COL_ADDR = const(0x21)
SET_PAGE_ADDR = const(0x22)
SET_DISP_START_LINE = const(0x40)
SET_SEG_REMAP = const(0xA0)
SET_MUX_RATIO = const(0xA8)
SET_IREF_SELECT = const(0xAD)
SET_COM_OUT_DIR = const(0xC0)
SET_DISP_OFFSET = const(0xD3)
SET_COM_PIN_CFG = const(0xDA)
SET_DISP_CLK_DIV = const(0xD5)
SET_PRECHARGE = const(0xD9)
SET_VCOM_DESEL = const(0xDB)
SET_CHARGE_PUMP = const(0x8D)
# Subclassing FrameBuffer provides support for graphics primitives
# http://docs.micropython.org/en/latest/pyboard/library/framebuf.html
class SSD1306(framebuf.FrameBuffer):
def __init__(self, width, height, external_vcc):
self.width = width
self.height = height
self.external_vcc = external_vcc
self.pages = self.height // 8
self.buffer = bytearray(self.pages * self.width)
super().__init__(self.buffer, self.width, self.height, framebuf.MONO_VLSB)
self.init_display()
def init_display(self):
for cmd in (
SET_DISP, # display off
# address setting
SET_MEM_ADDR,
0x00, # horizontal
# resolution and layout
SET_DISP_START_LINE, # start at line 0
SET_SEG_REMAP | 0x01, # column addr 127 mapped to SEG0
SET_MUX_RATIO,
self.height - 1,
SET_COM_OUT_DIR | 0x08, # scan from COM[N] to COM0
SET_DISP_OFFSET,
0x00,
SET_COM_PIN_CFG,
0x02 if self.width > 2 * self.height else 0x12,
# timing and driving scheme
SET_DISP_CLK_DIV,
0x80,
SET_PRECHARGE,
0x22 if self.external_vcc else 0xF1,
SET_VCOM_DESEL,
0x30, # 0.83*Vcc
# display
SET_CONTRAST,
0xFF, # maximum
SET_ENTIRE_ON, # output follows RAM contents
SET_NORM_INV, # not inverted
SET_IREF_SELECT,
0x30, # enable internal IREF during display on
# charge pump
SET_CHARGE_PUMP,
0x10 if self.external_vcc else 0x14,
SET_DISP | 0x01, # display on
): # on
self.write_cmd(cmd)
self.fill(0)
self.show()
def poweroff(self):
self.write_cmd(SET_DISP)
def poweron(self):
self.write_cmd(SET_DISP | 0x01)
def contrast(self, contrast):
self.write_cmd(SET_CONTRAST)
self.write_cmd(contrast)
def invert(self, invert):
self.write_cmd(SET_NORM_INV | (invert & 1))
def rotate(self, rotate):
self.write_cmd(SET_COM_OUT_DIR | ((rotate & 1) << 3))
self.write_cmd(SET_SEG_REMAP | (rotate & 1))
def show(self):
x0 = 0
x1 = self.width - 1
if self.width != 128:
# narrow displays use centred columns
col_offset = (128 - self.width) // 2
x0 += col_offset
x1 += col_offset
self.write_cmd(SET_COL_ADDR)
self.write_cmd(x0)
self.write_cmd(x1)
self.write_cmd(SET_PAGE_ADDR)
self.write_cmd(0)
self.write_cmd(self.pages - 1)
self.write_data(self.buffer)
class SSD1306_I2C(SSD1306):
def __init__(self, width, height, i2c, addr=0x3C, external_vcc=False):
self.i2c = i2c
self.addr = addr
self.temp = bytearray(2)
self.write_list = [b"\x40", None] # Co=0, D/C#=1
super().__init__(width, height, external_vcc)
def write_cmd(self, cmd):
self.temp[0] = 0x80 # Co=1, D/C#=0
self.temp[1] = cmd
self.i2c.writeto(self.addr, self.temp)
def write_data(self, buf):
self.write_list[1] = buf
self.i2c.writevto(self.addr, self.write_list)
class SSD1306_SPI(SSD1306):
def __init__(self, width, height, spi, dc, res, cs, external_vcc=False):
self.rate = 10 * 1024 * 1024
dc.init(dc.OUT, value=0)
res.init(res.OUT, value=0)
cs.init(cs.OUT, value=1)
self.spi = spi
self.dc = dc
self.res = res
self.cs = cs
import time
self.res(1)
time.sleep_ms(1)
self.res(0)
time.sleep_ms(10)
self.res(1)
super().__init__(width, height, external_vcc)
def write_cmd(self, cmd):
self.spi.init(baudrate=self.rate, polarity=0, phase=0)
self.cs(1)
self.dc(0)
self.cs(0)
self.spi.write(bytearray([cmd]))
self.cs(1)
def write_data(self, buf):
self.spi.init(baudrate=self.rate, polarity=0, phase=0)
self.cs(1)
self.dc(1)
self.cs(0)
self.spi.write(buf)
self.cs(1)Le fichier main.py
# import de la gestion des sorties et du protocole I2C
from machine import Pin, I2C
# on importe notre fichier ssd1306.py
import ssd1306
# on assigne les sorties
i2c = I2C(0, scl=Pin(22), sda=Pin(21))
# Taille de l'ecran
oled_width = 128
oled_height = 64
oled = ssd1306.SSD1306_I2C(oled_width, oled_height, i2c)
# le texte
oled.text('Bonjour', 10, 0)
oled.text('Schrek.fr!', 20, 20)
oled.show()voir sur wokwi
https://wokwi.com/projects/372502332559809537
Liens
https://www.robot-maker.com/ouvrages/pico-laboratoire-lcd/lafficheur-oled-ssd1306/
http://www.crepp.org/technique/ssd1306/
https://peppe8o.com/ssd1306-i2c-oled-raspberry-pi-pico-micropython/
Métadonnées
Posté le: 14.10.2023
Nombre de mots: 619
Temps de lecture: 3 minutes
Cet article fait partie de la série: Esp32
Communiquer avec l'Esp32 MQTT